
全量推送車位到車位,理想使出智駕殺手锏
作者:
AO記者 李琳
2024-11-29 19:35

11月28日,理想智能駕駛車位到車位功能隨OTA6.5版本車機(jī)系統(tǒng)向理想L系列AD Max用戶和理想MEGA用戶全量推送,理想成為全球首家全量推送這一功能的車企。
2021年,理想才開始自研智能駕駛,同為造車新勢(shì)力的小鵬在2014年就開始自研智駕,對(duì)比之下可以發(fā)現(xiàn),理想入局智駕的時(shí)間并不算早。但在3年時(shí)間里,理想智駕發(fā)展卻一路逆襲,堪稱智駕領(lǐng)域“卷王”之一。
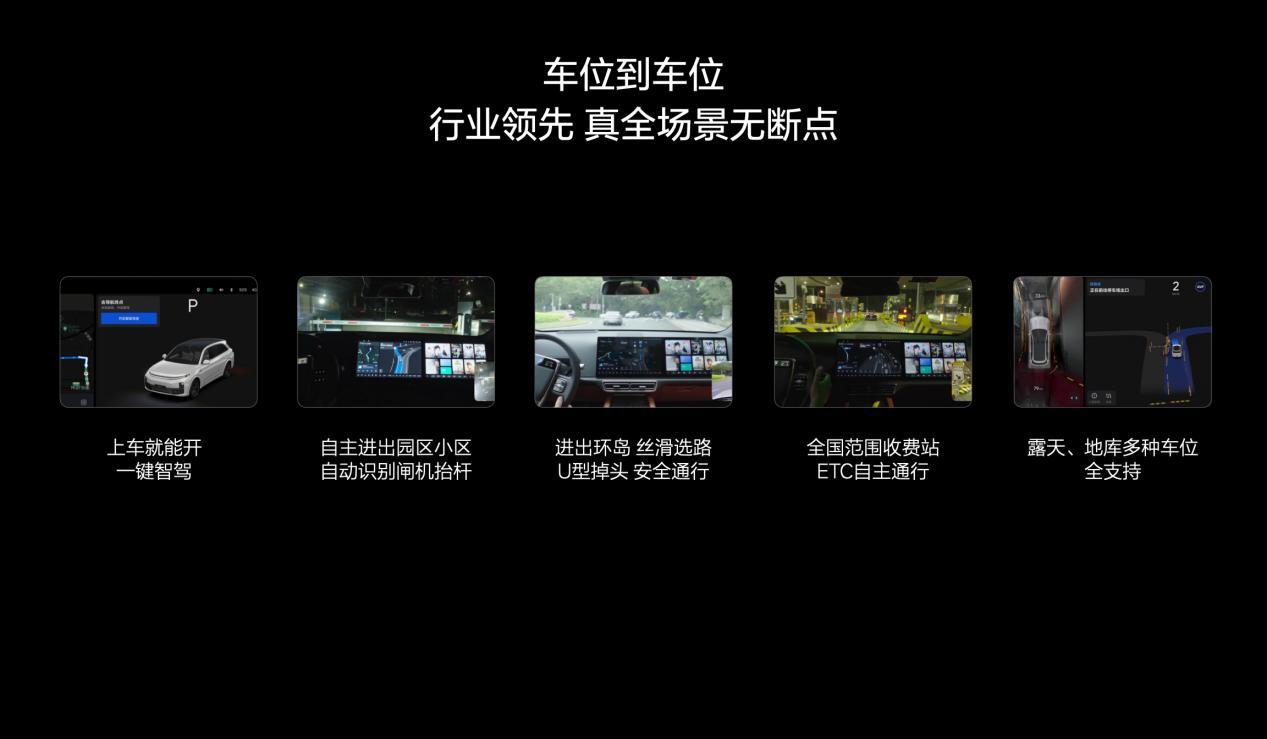
全球首家全量推送車位到車位
理想智駕車位到車位功能全量推送后,用戶上車即可開啟一鍵智駕,自主泊出車位,自主進(jìn)出園區(qū)和識(shí)別閘機(jī)抬桿,城市環(huán)島、掉頭等復(fù)雜場(chǎng)景無感通行,可駛?cè)敕忾]的園區(qū)及小區(qū),自動(dòng)將導(dǎo)航終點(diǎn)匹配園區(qū)或小區(qū)內(nèi)的行駛路線,無論是露天還是地庫等各種停車位,都能夠自主泊入車位。
此次升級(jí)還新增了理想首創(chuàng)的基于端到端+VLM實(shí)現(xiàn)的全國(guó)高速收費(fèi)站ETC通行功能,不依賴地圖數(shù)據(jù),支持全國(guó)范圍所有收費(fèi)站識(shí)別與通行。智能泊車方面新增智能泊出功能,在空間較窄的車位,例如垂直、斜列、側(cè)方等場(chǎng)景,可使用一鍵智能泊出,有無車位線都能泊出。
除了上述智駕功能升級(jí),在主動(dòng)安全方面,AD Max和AD Pro新增后向主動(dòng)緊急制動(dòng)R-AEB,減少倒車過程中的碰撞風(fēng)險(xiǎn),在倒車過程中,檢測(cè)本車與后方行人、騎車人及車輛等靜止目標(biāo)存在的碰撞風(fēng)險(xiǎn),必要時(shí)幫用戶主動(dòng)剎車減免事故。AD Max新增后向誤加速抑制MAI,減免倒車誤操作的事故傷害,在倒車場(chǎng)景中,駕駛員誤踩加速踏板(100%油門),面對(duì)行人、騎行人、車輛有碰撞風(fēng)險(xiǎn)時(shí),自動(dòng)抑制油門加速響應(yīng),發(fā)出危險(xiǎn)告警提示,語音播報(bào)請(qǐng)松開加速踏板,減免碰撞事故。上述兩項(xiàng)功能均支持倒車最高速度45km/h激活,覆蓋倒車全速域范圍。

在此次OTA之前,理想在廣州車展就專門打造了智能駕駛與智能空間的技術(shù)社區(qū),展示理想在智能空間、智能駕駛等核心領(lǐng)域應(yīng)用AI技術(shù)取得的進(jìn)展。聚焦在智駕端,理想展示了其端到端+VLM雙系統(tǒng)方案。
其中,One-Model結(jié)構(gòu)端到端模型是駕駛方式更加擬人,適應(yīng)全場(chǎng)景的NOA產(chǎn)品。這一系統(tǒng)可以實(shí)現(xiàn)信息的高效傳遞,對(duì)模型的中間特征可以進(jìn)行無損編碼;推理的高效計(jì)算,在GPU里一次性完成模型推理,做到了最小的端到端延遲;模型的高效迭代,一體化模型端到端全鏈條可導(dǎo)可訓(xùn),因?yàn)闆]有規(guī)則斷點(diǎn),可以做到全數(shù)據(jù)驅(qū)動(dòng),快速迭代。
VLM視覺語言大模型則首次將大模型部署到車端量產(chǎn)芯片,具備在物理世界中理解復(fù)雜的交通環(huán)境和語義的能力,能夠像識(shí)別潮汐車道、減速帶,判斷主路輔路,攻克了智能駕駛的行業(yè)難題,22億模型參數(shù)的學(xué)習(xí)與迭代,更使得未知場(chǎng)景推理速度縮短至0.3s。
起了個(gè)大晚,趕了個(gè)早集
眾所周知,端到端之戰(zhàn),是資源之戰(zhàn)。信達(dá)證券發(fā)布的研報(bào)寫到,智能駕駛算法層面逐漸收斂至“端到端”架構(gòu)后,數(shù)據(jù)+算力將成為核心競(jìng)爭(zhēng)要素,頭部車企或供應(yīng)商能掌握更多更優(yōu)的數(shù)據(jù),以及更強(qiáng)更快的算力,而優(yōu)秀的智駕能力有望加強(qiáng)銷量轉(zhuǎn)化,最終強(qiáng)化車企馬太效應(yīng),令智駕強(qiáng)者愈強(qiáng)。
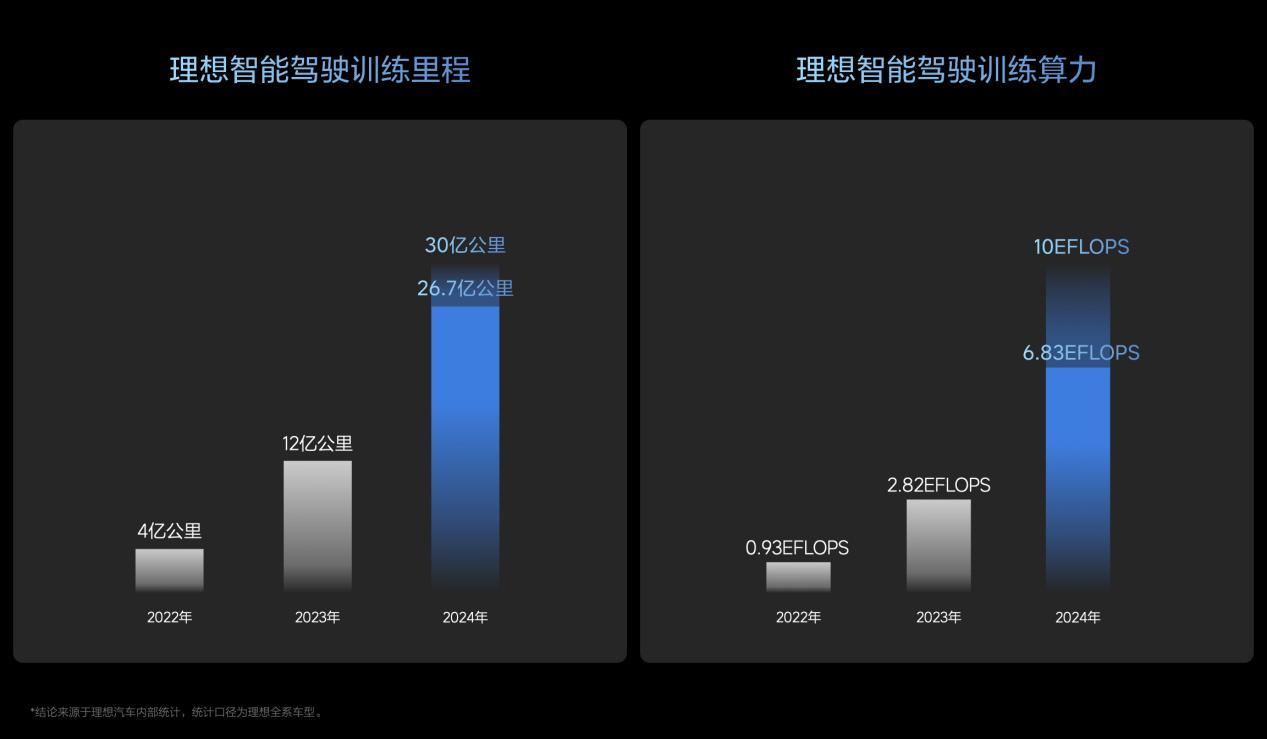
在算力與數(shù)據(jù)的積累上,理想已經(jīng)實(shí)現(xiàn)了領(lǐng)先。理想整體算力目前已到達(dá)6.83EFLOPS,預(yù)計(jì)年底將超過 10EFLOPS。智能駕駛數(shù)據(jù)訓(xùn)練量持續(xù)增長(zhǎng),已經(jīng)達(dá)到500w clips,為理想智能駕駛的發(fā)展提供了堅(jiān)實(shí)的數(shù)據(jù)支撐。
截至目前,理想智能駕駛總用戶達(dá)到100萬+,智能駕駛總里程突破26.7億公里;導(dǎo)航智能駕駛NOA總里程突破14.4億公里,截止10月,NOA里程占智駕總里程的90%。
從銷量層面來看,30萬以上車型的AD Max銷售占比70%,40萬以上車型AD Max的銷售占比已經(jīng)達(dá)到80%。相比今年初,AD Max的銷量占比漲幅達(dá)到26%,用戶對(duì)于理想智能駕駛的認(rèn)可度正在穩(wěn)步增長(zhǎng)。
2021年才開始自研智能駕駛的理想,卻成為行業(yè)首個(gè)全量推送“車位到車位”智駕功能的車企,可謂名副其實(shí)地起了個(gè)大晚,趕了個(gè)早集。為什么入局較晚的理想,卻能夠在智駕領(lǐng)域后來居上?
組織效率高、試錯(cuò)時(shí)間少是理想在智駕領(lǐng)域快速追趕,乃至領(lǐng)先的原因。理想智能駕駛研發(fā)副總裁郎咸朋曾在采訪中表示,理想從決定要自研智駕,到定方案,到把團(tuán)隊(duì)拉起來,可能也就1周時(shí)間。相比之下,傳統(tǒng)車企項(xiàng)目啟動(dòng)也許就要3個(gè)月。
在技術(shù)研發(fā)推進(jìn)上,郎咸朋認(rèn)為,技術(shù)研發(fā)需要時(shí)間,但往往需要的不是研發(fā)時(shí)間,而是試錯(cuò)時(shí)間。“特斯拉確實(shí)是一個(gè)很好的標(biāo)桿,他試錯(cuò)走不通的地方,我們就不走了。特斯拉 FSD 的演進(jìn)和迭代讓我們看到了無圖也能成功。選 NPN 還是無圖?既然特斯拉跑出來了,那我們就選無圖,所以我們幾個(gè)月就實(shí)現(xiàn)了切換。”
理想在自動(dòng)駕駛技術(shù)端口的布局依然在提速中,按照理想汽車董事長(zhǎng)兼CEO李想的規(guī)劃,最早今年年底,最晚明年年初,理想就會(huì)全量推送有監(jiān)督的L3級(jí)別自動(dòng)駕駛,3年內(nèi)一定會(huì)實(shí)現(xiàn)L4無監(jiān)督自動(dòng)駕駛。

商務(wù)合作
電話:13051199966
地址:北京市朝陽區(qū)清林路1號(hào)世茂奧臨花園
版權(quán)所有 © 1999-2018 北京云聯(lián)文化傳播有限公司
網(wǎng)站建設(shè):中企動(dòng)力 北京